Shortly after my first biped robot I started designing a new one, which later on became the subject of my Bachelor's Thesis.
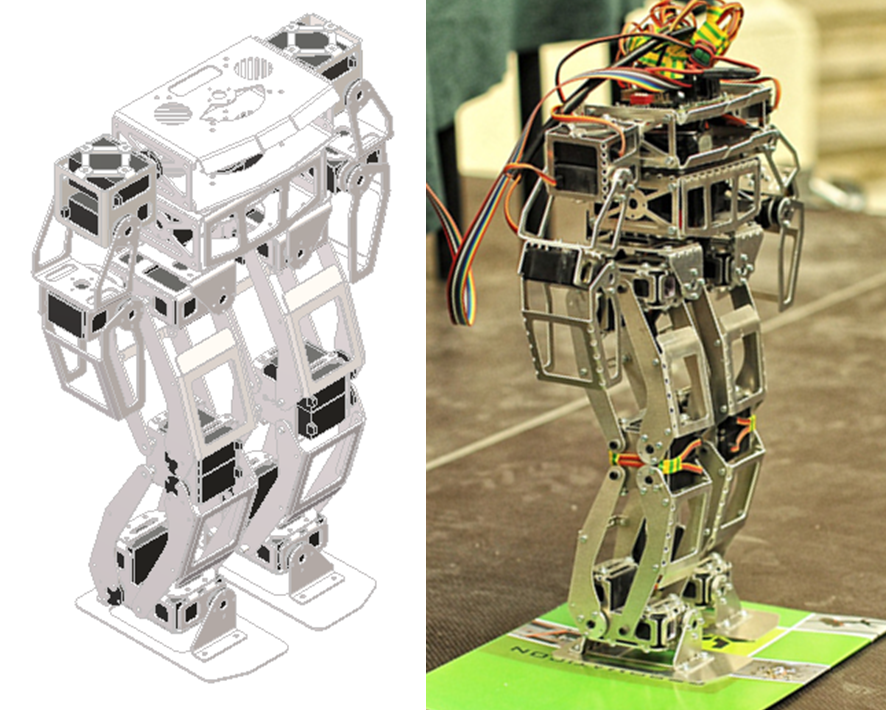 To prepare for the project, I tested various CAD software, finally settling with Eagle PCB for the electronics and Autodesk Inventor for the mechanics. This robot used stronger than before, 21 MG996r TowerPro servos. To achieve a more stable walk, the torque in the legs was maximized by connecting the servos in a parallel configuration. The frame of the robot was machined out of aluminum, for minimizing the weight and providing enough stiffness. A lot of the components were designed to be later replaced by carbon fibre parts. The whole robot weighed in at 2kg, while the servos amounted to 60% of its weight. The controller was built using the ATmega128. It had the ability to simultaneously control the position and speed of each individual servo, gather data from various analog sensors, select the mode of operation and connect expansion modules via UART, SPI and I2C. For the walking gait, feedback from an analog accelerometer was used to balance the robot in the Roll axis. The Pitch axis was auto-balanced by the parallel link mechanism(PLM). Here are some(although not really good) videos which show everything in motion:
To prepare for the project, I tested various CAD software, finally settling with Eagle PCB for the electronics and Autodesk Inventor for the mechanics. This robot used stronger than before, 21 MG996r TowerPro servos. To achieve a more stable walk, the torque in the legs was maximized by connecting the servos in a parallel configuration. The frame of the robot was machined out of aluminum, for minimizing the weight and providing enough stiffness. A lot of the components were designed to be later replaced by carbon fibre parts. The whole robot weighed in at 2kg, while the servos amounted to 60% of its weight. The controller was built using the ATmega128. It had the ability to simultaneously control the position and speed of each individual servo, gather data from various analog sensors, select the mode of operation and connect expansion modules via UART, SPI and I2C. For the walking gait, feedback from an analog accelerometer was used to balance the robot in the Roll axis. The Pitch axis was auto-balanced by the parallel link mechanism(PLM). Here are some(although not really good) videos which show everything in motion:
That's it for now, be sure to come back for more reads.
gficht