I'd like to start off with the first robot I've ever built. This was way back in 2008.
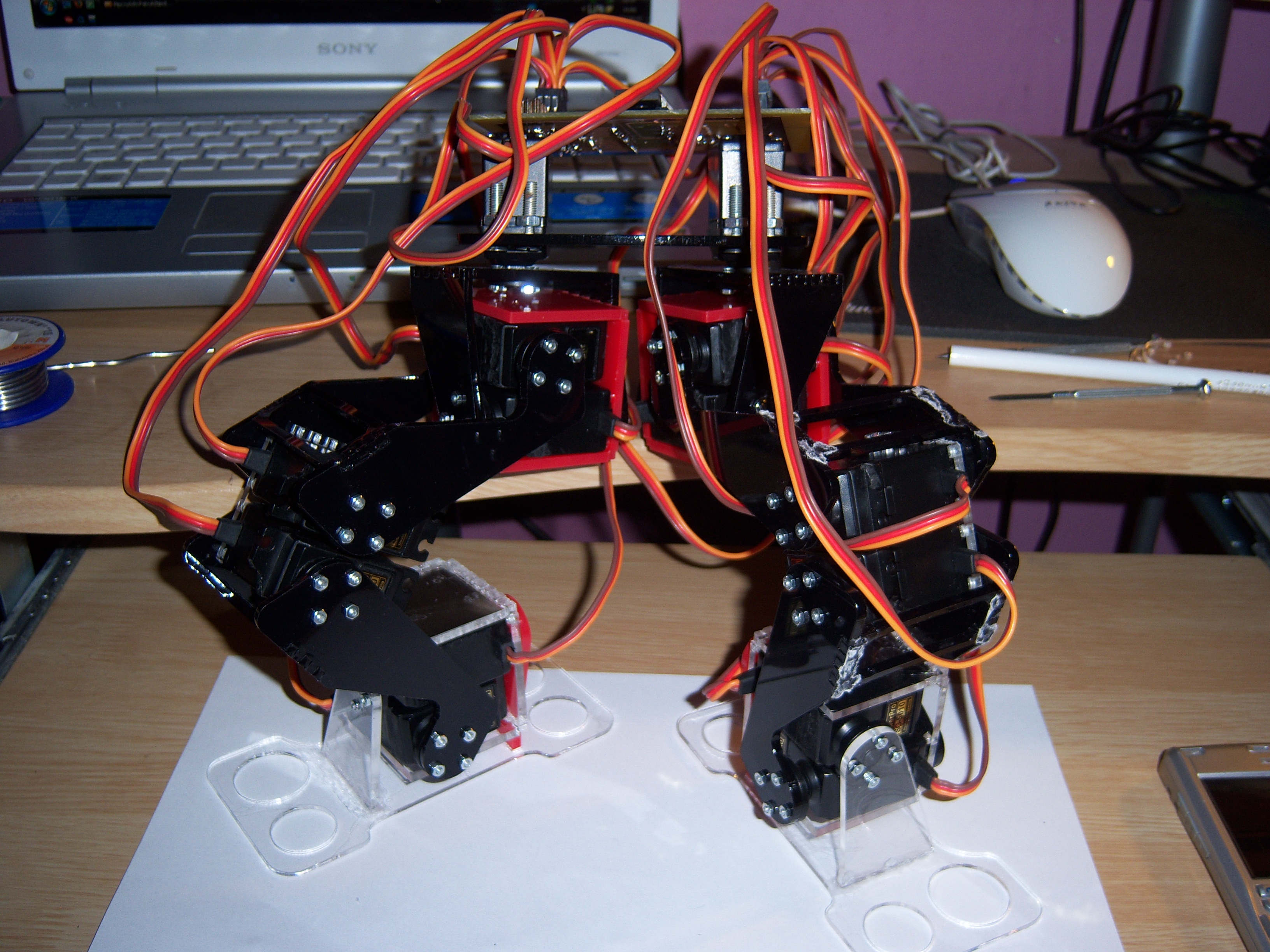 I've just started studying Automation and Robotics at Gdansk university of Technology. I decided to study that, after seeing a video of a robot called OmniZero.2 while still in high school. In the video - the robot created by Mr Takeshi Maeda was moving with such agility it was unbelievable for me. He clearly left all the competitors behind. For a technical high school student learning electronics, this was a huge feat. So I decided to give it a go and build something similar. The efforts can be seen on the left.
I've just started studying Automation and Robotics at Gdansk university of Technology. I decided to study that, after seeing a video of a robot called OmniZero.2 while still in high school. In the video - the robot created by Mr Takeshi Maeda was moving with such agility it was unbelievable for me. He clearly left all the competitors behind. For a technical high school student learning electronics, this was a huge feat. So I decided to give it a go and build something similar. The efforts can be seen on the left.
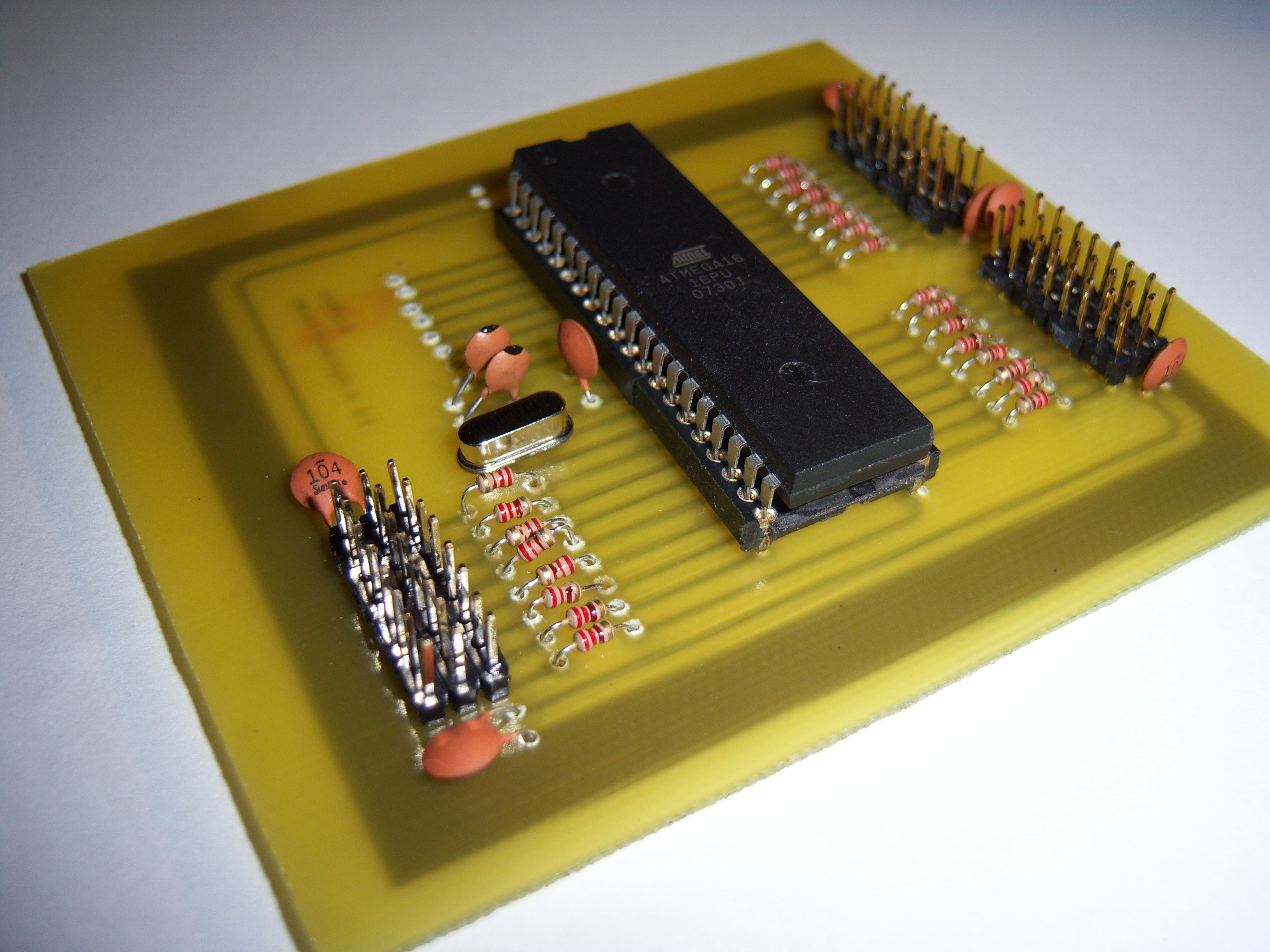 It used 14 TowerPro SG-5010 servos, the frame was cut out of plexiglass. The design was completely in my head - I drew the parts that were supposed to be cut out in vector graphics. The servocontroller I also did by myself. The PCB was big and bulky. The ATmega16 was just enough to run 24 servos with the use of interrupts. Everything was so unprofessional - but it worked and made me feel good about it. After trying some simple control schemes(a simple walking gait) I abandoned the robot and sold the servos. I learned a lot of valuable things by doing the project. This prepared me for another one I'd be doing in the future.
It used 14 TowerPro SG-5010 servos, the frame was cut out of plexiglass. The design was completely in my head - I drew the parts that were supposed to be cut out in vector graphics. The servocontroller I also did by myself. The PCB was big and bulky. The ATmega16 was just enough to run 24 servos with the use of interrupts. Everything was so unprofessional - but it worked and made me feel good about it. After trying some simple control schemes(a simple walking gait) I abandoned the robot and sold the servos. I learned a lot of valuable things by doing the project. This prepared me for another one I'd be doing in the future.
Thanks for reading, hope you liked it.
gficht